(PDFバージョン:jinnkiittaikenngakukai_yasugimasayosi)
人型ロボットを操縦したいと思ったことはないでしょうか。
ぼくの場合、子供のころはマジンガーZをはじめ、ガンダムやザクⅡ、ボトムズのアーマードトルーパー、マクロスのVF-1バルキリーなど巨大ロボットを操縦する自分をよく夢想したものです。
ただ、たとえ夢想であってもレバーやペダルを何の考えもなしにがちゃがちゃやって操縦しているのは、子供ながらどうにも納得できませんでした。だから巨大人型ロボットのコックピットのレイアウトを仕組みも考えながらノートにびっしり描き込んでました。(今も作中に人型ロボットなどを登場させるときはコックピットの設定をなるべく詳細に組むので、なんというか、四十歳過ぎても小学生のときとやってることが変わらない……)
これがやってみると本当に難しい。レバーやペダルをどう操作したら自分の思い通りに人型ロボットが動かせるのか、うまく思いつかないのです。ロボットアニメみたいに走って転がったり、ライフルを振り向きざまに撃ったり、サーベルで敵ロボットと斬り結んだりとあんな器用に四肢を動かす操縦システムは一体どうなっているのか。「人型」であるゆえにかえって操縦が難しく、頭を絞って試行錯誤した記憶があります。
そんな人型ロボットを自在に操る操縦システムを開発している会社があります。
金岡克弥博士が率いる株式会社「人機一体」。
立命館大学びわこ・くさつキャンパス内にあるこの会社の見学会に、日本SF作家クラブとして林譲治会員のお誘いを受け、増田まもる会員とぼくが参加しました。
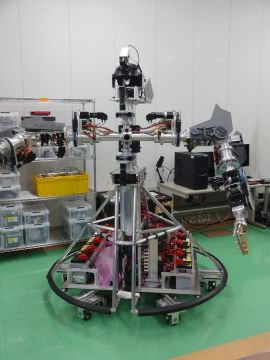
最初に見せていただいたのはロボットの腕にあたる「パワーエフェクタ」です。

かなり重量のある「鉄腕」で、起動前は持ち上げることすら難しいのですが、パワーアシストを入れると、発泡スチロールみたいに軽くなり、簡単に操作することができます。
さらには物をつかむ手のところは人差し指一本で操作が可能です。ここにコーヒーのスチール缶を縦に挟み、ほんの少し人差し指に力を入れてやるだけで、一瞬のうちに潰せる力を発揮します。実際、自分で操作してみるとスチール缶は見事にぺったんこになりました。またそれだけのパワーがあるのに、卵のような壊れやすいものも潰すことなく優しくはさむこともできるそうです。
次はマスタースレーブ式のロボット操縦システムを紹介していただきました。
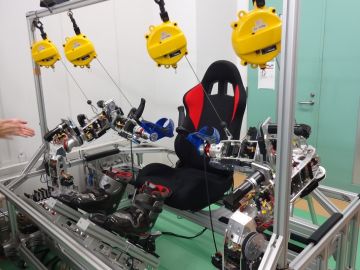
操縦装置(マスター)で双腕のロボット(スレーブ)を遠隔操作するシステムで、こちらも社員の実演のあと、ぼくも操作させていただきました。
操縦レバーはそれ自体がロボットの腕みたいに稼働軸が複数あり、とても軽やかに動かすことができます。レバーを上げればロボットの腕が上がり、内側にひねると、腕のひじ関節を内側に曲げるといった操縦ができます。
少し力を入れるだけで簡単に動いてしまうので、慣れないと細かい動きは難しく感じました。それでもロボットの動作は滑らかで人みたいに動けるので、操縦に熟達すればロボットアニメみたいなアクションもできそうでした。この熟達すればというところが面白くて、基本的に誰でも操縦できるのですが、人によってロボットの動きに違いが出てくると思われ、熟練の人型ロボット操縦者による操演は見惚れるほど素晴らしいものにもなるのではないでしょうか。それだけの自由度を感じました。
脚部は二本足の部分がまだ開発中で今は台車みたいになっているのですが、これも足で操作が可能で、ペダルに固定されたブーツに足を入れて、つま先とかかとに力を入れることで前後左右に移動させることができます。
それからこのロボット操縦システムの特徴に、ロボット側の腕をつかんで動かすと、それがダイレクトに操縦装置にも伝わってレバーを動かす仕組みがあります。
つまり何か障害物にぶつかっても「ぶつかっている」という感覚が操縦システム越しに操縦者へ反動として伝わるので、危険をリアルに察知することができ、ロボットの腕を壊してしまったり、またはロボットのパワーで障害物を意図せず破壊してしまうことも防げるわけです。
最後にロボットの目にあたるカメラ装置を体験させていただきました。


人間の両眼のように二つのカメラで立体視できるようになっており、VR用のヘッドマウントディスプレイのゴーグルを装着して映像を見ることができます。
かぶってみると、巨大ロボット用というカメラの構造上、やや魚眼の映像で視野はかなり広く取られていました。
またこのカメラもロボットで、かぶった本人の頭の動きをセンサーが読み取って、カメラも頭と同じように動く仕組みになっています。
だからうつむいて自分の胸元に目をやると、視界に映るのは自分ではなく、フレームやケーブルの集まりであるロボットの体なのです。まるで自分の体がロボットの体になったかのような認識になり、ロボットと自分が一体化した感覚を味わうことができます。それこそ「人機一体」を実感できる面白さがありました。
これらの人型ロボットの開発の目的は、金岡博士がおっしゃるには「パワー」の追求だそうです。現在の人型ロボットは人とのコミュニケーションを主眼に置かれているものが多いのですが、社会に役立つロボットとは人の力(パワー)となるロボットではないかという主張です。たとえば福島第一原発事故の後処理および廃炉作業は、それこそロボットが必要にもかかわらず、現実に活躍できるロボットが日本にほとんどありません。
人自身の力を大幅に拡張し、安全にコントロールする。それが株式会社「人機一体」が生まれさせようとしている巨大人型ロボットであり、別の言い方をすれば「人型重機」なのです。
重機といえばすでに建設機械としてブルドーザーやショベルカーなどがありますが、人型であるからこその高度な汎用性は言うまでもなく人である我々がよく知っています。またここを読まれる方でしたら「機動警察パトレイバー」のレイバーが頭に浮かんだことでしょう。社会的な意味合いとしてはまさしくあれです。
その上さらなる発展も考えられます。たとえば腕は二本と決めなくてもいいのです。四本でも六本でも増やすなどすれば、これまで考えもしなかった作業がこなせるようになるのではないでしょうか。そうなれば人の力の増大だけでなく、新しい機能の拡大まで及ぶことになるかもしれません。そして、マスタースレーブ操縦という人の身体とロボットとの非侵襲的一体化による身体感覚の拡大は、人の認識能力の広がりと変容を生み、それこそ……って、空想の飛躍が果てしなくなりそうなのでこのへんで。
とにかくSFが現実になろうとしている現場を見学できて本当に楽しかったです。
個人的にはロボットをもっと広いところに出して、マスタースレーブ操縦で思い切り遊びたかったなあ。
八杉将司既刊
『アンダー・ヘイヴン7
記憶に憎まれた男』